全国高分辨率土地利用数据服务 土地利用数据服务 土地覆盖数据服务 坡度数据服务 土壤侵蚀数据服务 全国各省市DEM数据服务 耕地资源空间分布数据服务 草地资源空间分布数据服务 林地资源空间分布数据服务 水域资源空间分布数据服务 建设用地空间分布数据服务 地形、地貌、土壤数据服务 分坡度耕地数据服务 全国大宗农作物种植范围空间分布数据服务
多种卫星遥感数据反演植被覆盖度数据服务 地表反照率数据服务 比辐射率数据服务 地表温度数据服务 地表蒸腾与蒸散数据服务 归一化植被指数数据服务 叶面积指数数据服务 净初级生产力数据服务 净生态系统生产力数据服务 生态系统总初级生产力数据服务 生态系统类型分布数据服务 土壤类型质地养分数据服务 生态系统空间分布数据服务 增强型植被指数数据服务
多年平均气温空间分布数据服务 多年平均降水量空间分布数据服务 湿润指数数据服务 大于0℃积温空间分布数据服务 光合有效辐射分量数据服务 显热/潜热信息数据服务 波文比信息数据服务 地表净辐射通量数据服务 光合有效辐射数据服务 温度带分区数据服务 山区小气候因子精细数据服务
全国夜间灯光指数数据服务 全国GDP公里格网数据服务 全国建筑物总面积公里格网数据服务 全国人口密度数据服务 全国县级医院分布数据服务 人口调查空间分布数据服务 收入统计空间分布数据服务 矿山面积统计及分布数据服务 载畜量及空间分布数据服务 农作物种植面积统计数据服务 农田分类面积统计数据服务 农作物长势遥感监测数据服务 医疗资源统计数据服务 教育资源统计数据服务 行政辖区信息数据服务
Landsat 8 高分二号 高分一号 SPOT-6卫星影像 法国Pleiades高分卫星 资源三号卫星 风云3号 中巴资源卫星 NOAA/AVHRR MODIS Landsat TM 环境小卫星 Landsat MSS 天绘一号卫星影像






算法思想
VIPs法利用点的局部偏差来衡量各个数据点的重要性,然后保留预定数目的“重要”点或满足指定重要性水平(阀值)的点,之后D三角化之。
最大Z容差法则是将重要点的选取作为一个优化问题来处理,就是利用格网点原始高程和包含该点的三角形估算的高程差来动态选取重要点。
两种实现方法
启发丢弃算法与逐步精细算法
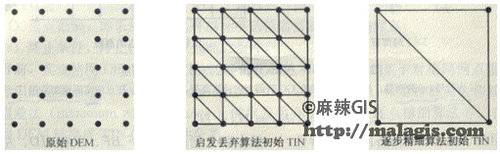
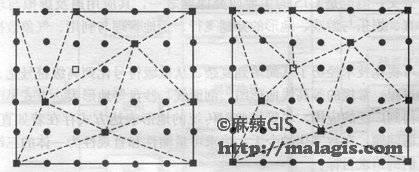
逐步精细算法
算法步骤
S1、连接格网DEM边界四个角点中任意对角的两个点,形成初始三角网。
S2、对每个格网点,找到包含它的三角形,内插该点在所在三角形面上的高程,求出内插高程与该点原始高程之差的绝对值(称为误差)。
S3、如果所有的格网点的误差都在最大容许的范围内则处理结束,输出TIN网;反之则进行下一步。
S4、将具有最大误差的格网点插入已存在的TIN中构成新的TIN,并返回S2。
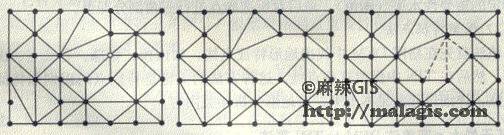
启发丢弃算法
算法步骤
S1、连接对角线形成初始三角网;对TIN中的每个点P做如下工作:对暂时移去P后形成的多边形D三角化;找到P所在三角形后内插P点高程与高程值求差值e(P)并记录;恢复P到TIN中。
S2、找到记录的最小e(P),如果最小e(P)大于给定的阀值,则TIN中全是重要点,算法结束,输出TIN;反之进入下一步。
S3、从TIN删除P,对因此形成的多边形D三角化,形成新TIN。
S4、在新TIN中重新计算原P的各邻接点的e值,返回步骤S2。