全国高分辨率土地利用数据服务 土地利用数据服务 土地覆盖数据服务 坡度数据服务 土壤侵蚀数据服务 全国各省市DEM数据服务 耕地资源空间分布数据服务 草地资源空间分布数据服务 林地资源空间分布数据服务 水域资源空间分布数据服务 建设用地空间分布数据服务 地形、地貌、土壤数据服务 分坡度耕地数据服务 全国大宗农作物种植范围空间分布数据服务
多种卫星遥感数据反演植被覆盖度数据服务 地表反照率数据服务 比辐射率数据服务 地表温度数据服务 地表蒸腾与蒸散数据服务 归一化植被指数数据服务 叶面积指数数据服务 净初级生产力数据服务 净生态系统生产力数据服务 生态系统总初级生产力数据服务 生态系统类型分布数据服务 土壤类型质地养分数据服务 生态系统空间分布数据服务 增强型植被指数数据服务
多年平均气温空间分布数据服务 多年平均降水量空间分布数据服务 湿润指数数据服务 大于0℃积温空间分布数据服务 光合有效辐射分量数据服务 显热/潜热信息数据服务 波文比信息数据服务 地表净辐射通量数据服务 光合有效辐射数据服务 温度带分区数据服务 山区小气候因子精细数据服务
全国夜间灯光指数数据服务 全国GDP公里格网数据服务 全国建筑物总面积公里格网数据服务 全国人口密度数据服务 全国县级医院分布数据服务 人口调查空间分布数据服务 收入统计空间分布数据服务 矿山面积统计及分布数据服务 载畜量及空间分布数据服务 农作物种植面积统计数据服务 农田分类面积统计数据服务 农作物长势遥感监测数据服务 医疗资源统计数据服务 教育资源统计数据服务 行政辖区信息数据服务
Landsat 8 高分二号 高分一号 SPOT-6卫星影像 法国Pleiades高分卫星 资源三号卫星 风云3号 中巴资源卫星 NOAA/AVHRR MODIS Landsat TM 环境小卫星 Landsat MSS 天绘一号卫星影像






所谓删格数据可以按照下面的方法描述:
将工作区域的平面表象按一定分解力作行和列的规则划分,形成许多格网,每个网格单元称为象素(pixel)。根据所表示实体的表象信息差异,各象元可用不同的“灰度值”来表示 。
若每个象元规定N比特,则其灰度值范围可在0到2^N—1之间;把白~灰色~黑的连续变化量化成8比特(bit),其灰度值范围就允许在0~255之间;若每个象元只规定1比特,则灰度值仅为0和1,这就是所谓二值图像。
点实体在栅格数据中表示为一个像元;线实体则表示为在一定方向上连接成串的相邻像元集合;面实体由聚集在一起的相邻像元集合表示。
示意图如下:

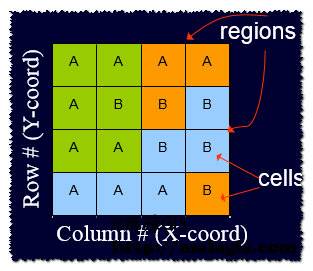
栅格数据结构实际上就是象元阵列,即象元按矩阵形式的集合(二维数组),栅格中的每个象元是栅格数据中最基本的信息存储单元,其坐标位置可以用行号和列号确定。右图在计算机内是一个4*4阶的矩阵。但在外部设备上,通常是以左上角开始逐行逐列存贮。存贮顺序为: A A A A A B B B A A B B A A A B ,当每个像元都有唯一一个属性值时,一层内的编码就需要m行×n列×3(x,y和属性编码值)个存储单元。
分辩率(resolution)
分辨率依靠栅格数目,分辨率的改变会影响地物的识别,经度,周长,面积等等。